Berger Blog
Robot bin picking system
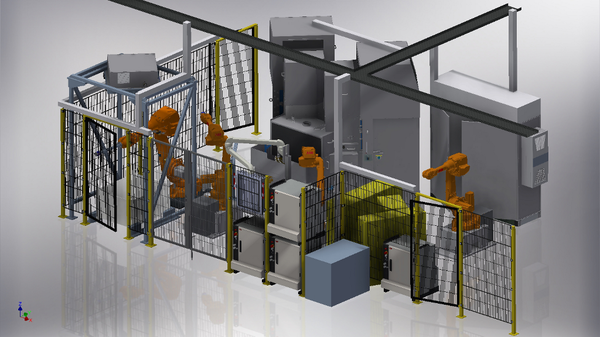
RAA | Handling of non-sorted workpieces: A camera system with high-resolution cameras - in this case from Keyence - detects the position of the workpieces, which are lying disorderly in a skeleton box or Schäfer box, and passes the data to the handling robot.
Robot bin picking system
Handling of non-sorted workpieces
A camera system with high-resolution cameras - in this case from Keyence - detects the position of the workpieces, which are lying disorderly in a skeleton box or Schäfer box, and passes the data to the handling robot.
- provision and feeding of disordered workpieces with bin-picking from two KLT boxes
- docking stations for KLT containers with repeatable positioning via stops
- bin-picking robot ABB
- double gripper with two magnetic grippers with adjustable magnetic force for removing workpieces from KLT box
- 3D robot vision
- camera-controlled turning and centering station
- 3D position detection via camera measuring system with high-resolution cameras
- automatic calculation of the optimal robot path
- special robot gripper depending on the workpiece
- loading robot with adjustable magnetic force for loading and unloading the grinding machine and