Berger Blog
Deburring, grinding and polishing with robotic technology
Deburring, grinding and polishing with robotic technology
Schleifen + Polieren, issue 1/2017
Deburring, grinding and polishing are core competences of the Berger Gruppe. The company which is located in Wuppertal (Germany) offers more or less 250 different machine models which are mostly computer controlled and nearly 600 robotic integrations for the machining of most different workpieces.
For the production of cutlery items, hand tools, surgical instruments and similar workpieces most precise workpiece tolerances have to be respected to guarantee a good quality. Measuring systems in connection with robotic technology are playing an increasingly important role in the field of grinding and polishing processes.
Robots with 4 to 7 axes are employed more and more. For the robot programming Berger provides a robotic basic program with specific applications which can be adapted to the customer’s requirements via specific teach positions. After saving these programs can be used again and again. Additional measuring stations measure each workpiece automatically before machining and compensate workpiece tolerances. As a result, the measuring data is integrated into the robot program.
Grinding wheels, grinding belts or polishing wheels can be used as tools. In that respect either the movement of the tool or the movement of the workpiece is robot-controlled.
The production of workpieces with complex geometries require the use of sophisticated deburring technology. For the machining of aluminum cast parts such as cylinder heads it is essential to realize a precise and defined deburring. The edges which have to be deburred should have a width of 0.3 to 0.5 mm to guarantee a maximum sealing surface.
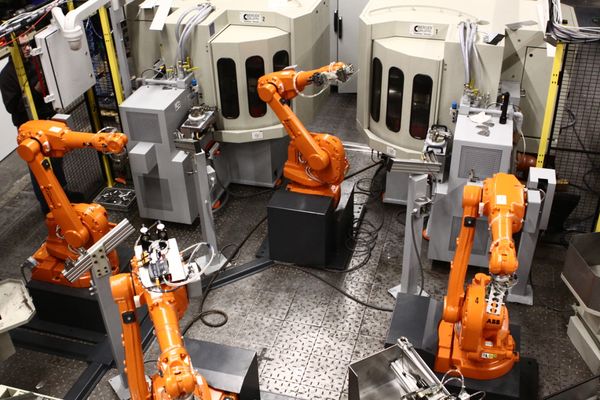
In this case robotic cells are employed which are equipped with rotationally driven tools such as router bits, abrasive pencils, lamellar grinding discs or brushes. Via measuring probes complete workpieces or separate contour elements are measured during production process for the programming and the control of the workpiece position.
Sequentially working robots can be assembled to a production cell so that the workpiece can be machined, washed, dried and stored in one automatic process.