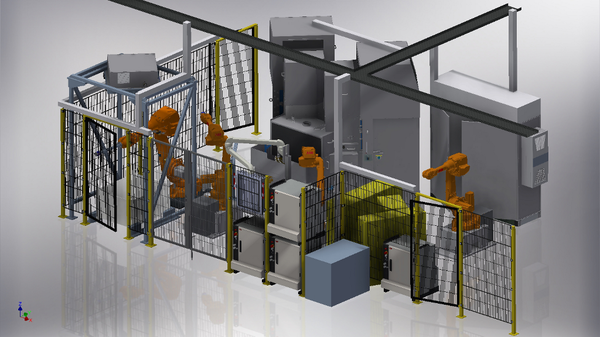
Roboter-Bin-Picking-System
RAA | Der Griff in die Kiste: Über ein Kamerasystem mit hochauflösenden Kameras - in diesem Fall von Keyence - wird die Lage der Werkstücke, die ungeordnet in einer Gitterbox oder Schäferkiste liegen, erkannt und an den Handlings-Roboter weitergegeben.
Roboter-Bin-Picking-System
Der Griff in die Kiste
Über ein Kamerasystem mit hochauflösenden Kameras - in diesem Fall von Keyence - wird die Lage der Werkstücke, die ungeordnet in einer Gitterbox oder Schäferkiste liegen, erkannt und an den Handlings-Roboter weitergegeben.
- Bereitstellung und Zuführung von ungeordneten Werkstücken mit Bin-Picking aus zwei KLT-Boxen
- Docking-Stationen für KLT-Behälter mit wiederholgenauer Positionierung über Anschläge
- Bin-Picking-Roboter ABB
- Doppelgreifer mit zwei Magnetgreifern mit einstellbarer Magnetkraft zur Entnahme von Werkstücken aus KLT-Box
- 3D-Robot-Vision
- Kamera-gesteuerte Wende- und Zentrierstation
- 3D-Lageerkennung über Kamera-Messsystem mit hochauflösenden Kameras
- Automatische Berechnung der optimalen Roboterbahn
- Spezieller Robotergreifer je nach Werkstück
- Beladeroboter mit einstellbarer Magnetkraft zum Be- und Entladen der Schleifmaschine und Beladen der Reinigungs- und Trockenstation