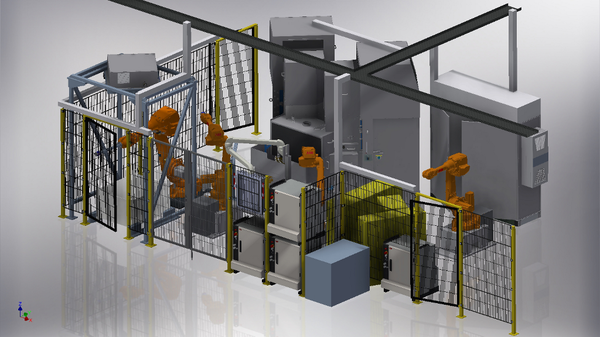
Robot bin picking system
RAA | Prélèvement en caisse : Un système de caméras à haute résolution -- dans ce cas, de Keyence - détecte la position des pièces qui se trouvent en désordre dans une caisse grillagée et les transmet au robot de manutention.
Robot bin picking system
Prélèvement en caisse
Un système de caméras à haute résolution -- dans ce cas, de Keyence - détecte la position des pièces qui se trouvent en désordre dans une caisse grillagée et les transmet au robot de manutention.
- Mise à disposition et alimentation de pièces non commandées avec prélèvement dans deux boîtes KLT
- Stations d’arrimage pour conteneurs KLT avec positionnement répétable grâce à des butées
- Robot collecteur de bacs ABB
- Pince double avec deux pinces magnétiques à force magnétique réglable pour retirer les pièces de la boîte KLT
- Vision 3D des robots
- Station de tournage et de centrage commandée par caméra
- Détection de la position 3D via un système de mesure par caméra avec des caméras à haute résolution
- Calcul automatique de la trajectoire optimale du robot
- Pince spéciale pour robot en fonction de la pièce à travailler
- Robot de chargement à force magnétique réglable pour le chargement et le déchargement de la machine de meulage et le chargement de la station de nettoyage et de séchage