Roboter-Entgrattechnologie auf der DeburringExpo



Schleifen + Polieren (6/2017)
Vom 10. bis 12. Oktober 2017 fand in Karlsruhe zum zweiten Mal die DeburrinEXPO statt. Rund 2.000 Besucher informierten sich auf der Fachmesse für Entgrat- und Poliertechnologie über die neuesten Entwicklungen auf dem Gebiet der mechanischen Bearbeitung von Werkstücken.
Mit über 2.000 Besuchern aus 38 Ländern und 15 Ausstellern konnte die DeburrinEXPO an den Erflog der Vorveranstaltung anknüpfen. Die fachliche Qualifikation und hohe Entscheidungskompetenz der Besucher garantiere den ausstellenden Unternehmen hochwertige Kontakte und daraus resultierend interessante Projekte.
Ein Höhepunkt der Messe war das zweisprachig durchgeführte Fachforum, das mit 29 Vorträgen und über 1.000 Teilnehmern sehr großen Zuspruch fand. Neben der Bearbeitung von Präzisionsoberflächen stand das Thema "Entgraten mit Robotertechnologie" im Fokus des Fachforums. Der Schwerpunkt lag hier auf dem effizienten Entgraten von Werkstücken in Kleinserien und damit verbunden der Bearbeitung unterschiedlichster Geometrien in einer Roboterzelle.
Dem trug Marco Chiesura, Geschäftsführer der Berger Gruppe, in seinem Vortrag über spanabhebendes Entgraten von Bändern und Werkstücken Rechnung. Am Beispiel von Bearbeitungen an Schneidwaren und Gussteilen wurden Roboter-Schleif- und -Entgratzellen vorgestellt, bei denen entweder das Werkstück oder das Werkzeug per Roboter geführt wird.
Zur Bearbeitung von Schneidwaren wird das Werkstück von einem Roboter geführt. Für die Bearbeitung werden unterschiedliche Schleif- und Polieraggregate eingesetzt. Das Werkstück, in diesem Fall ein Messer, wird vor der Bearbeitung im Robotergreifer vermessen. Lage sowie Toleranzen des Werkstücks werden erfasst und über Robotersteuerung automatisch korrigiert.
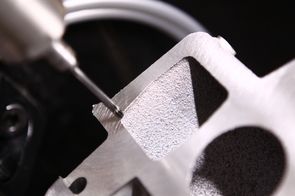
Bei der Bearbeitung von Gussteilen wird je nach Anforderung und Werkstückgröße entweder das Werkstück oder das Werkzeug per Roboter geführt. Wird das Gussteil per Roboter geführt, kann auch hier zuerst eine Ausrichtung, bzw. Vermessen des Werkstücks, über ein Kamerasystem erfolgen. Anschließend kann es zu einer feststehenden Bearbeitungsstation - in diesem Fall einem Fräser - geführt werden.
Je nach Aufgabenstellung besteht die Möglichkeit der Führung des bzw. der Werkzeuge über den Roboter. In den Roboter kann ein Druckmomente-Sensor integriert werden, der den Druck und die Geschwindigkeit beim Entfernen des Grats steuert. Sollen mehrere Entgratschritte hintereinander ausgeführt werden, kann ein Mehrspindelkopf eingesetzt werden, der Robotergeführt mit rotierend angetriebenen Werkzeugen wie Fräs- und Schleifstiften, Schleiffächerscheiben oder Bürsten das feststehende Werkstück bearbeitet.
Über einen integrierten 3-D-Messtaster können komplette Werkstücke oder einzelne Konturelemente zur Programmierung und Überprüfung der Werkstücklage im Prozess eingemessen werden. Mit speziell entwickelten Fräswerkzeugen werden gleichmäßige und schmale Entgratkanten an Aluminium-Gussteilen realisiert. So kann auch bei Werkstücken mit komplexen Geometrien eine produktionssichere Bearbeitung garantiert werden.
Alternativ besteht die Möglichkeit, die Roboterzelle mit einer oder mehreren CNC-Achsen auszustatten, über die das Werkstück zur Bearbeitung ausgerichtet werden kann.